Overview
The Power of Simulation in Robotics
Simulation is a cornerstone of modern robotics, offering a safe, scalable, and efficient environment for training and testing.
Train & Test
Develop and validate complex behaviors without risking real hardware.
Benchmark
Compare algorithms in reproducible, controlled scenarios.
Generate Data
Create vast datasets for learning at a fraction of the real-world cost.
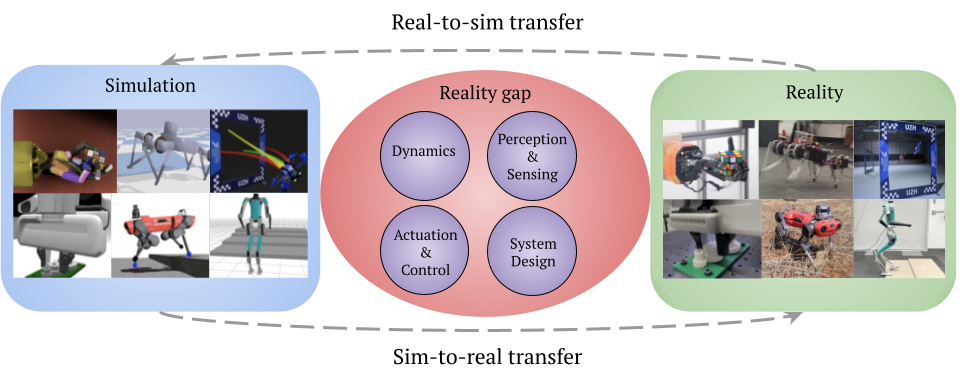
However, the effectiveness of simulation is often limited by the "reality gap"—the discrepancies between simulated and real-world environments.
The Reality Gap
Simulations are only approximations of the real world. The "reality gap" is the collection of discrepancies—from physics to perception—that can cause a policy to fail when transferred from simulation to a real robot.
This survey provides a comprehensive overview of the sim-to-real landscape. We dissect the problem, identify the sources of the reality gap, and provide metrics and solutions to understand and alleviate these problems in practice. Our goal is to boost the understanding of the problem by providing a guide for researchers and practitioners.
Abstract
Machine learning has facilitated significant advancements across various robotics domains, including navigation, locomotion, and manipulation. Many such achievements have been driven by the extensive use of simulation as a critical tool for training and testing robotic systems prior to their deployment in real-world environments. However, simulations consist of abstractions and approximations that inevitably introduce discrepancies between simulated and real environments, known as the reality gap. These discrepancies significantly hinder the successful transfer of systems from simulation to the real world. Closing this gap remains one of the most pressing challenges in robotics. Recent advances in sim-to-real transfer have demonstrated promising results across various platforms, including locomotion, navigation, and manipulation. By leveraging techniques such as domain randomization, real-to-sim transfer, state and action abstractions, and sim-real co-training, many works have overcome the reality gap. However, challenges persist, and a deeper understanding of the reality gap's root causes and solutions is necessary. In this survey, we present a comprehensive overview of the sim-to-real landscape, highlighting the causes, solutions, and evaluation metrics for the reality gap and sim-to-real transfer. Our goal is to provide a guide to identifying the challenges and opportunities for future advancements in sim-to-real transfer for robotic systems.
Sources of the Reality Gap
Dynamics
Discrepancies in physics simulation including rigid body dynamics, friction, contact forces, and material properties.
Perception & Sensing
Differences in sensor data between simulation and reality, affecting visual, tactile, and proprioceptive feedback.
Actuation & Control
Variations in motor behavior, joint dynamics, and control system responses between simulated and real hardware.
System Design
System-level differences including communication delays, safety mechanisms, and software stack inconsistencies.
Solution Taxonomy
Reducing the Gap
Making simulation more realistic through improved fidelity and smart design choices
System Identification
Parameter estimation and calibration techniques
Physics Learning
Learning residual dynamics and corrections
Hardware Design
Co-design of hardware and simulation
Overcoming the Gap
Making policies robust to reality gap through diverse training
Domain Randomization
Training across diverse simulated environments
Data-Driven Transfer
Incorporating real-world data into training
Adaptive Methods
Online adaptation and meta-learning
Citation
@article{aljalbout2025reality,
title={The Reality Gap in Robotics: Challenges, Solutions, and Best Practices},
author={Aljalbout, Elie and Xing, Jiaxu and Romero, Angel and Akinola, Iretiayo and Garrett, Caelan and Heiden, Eric and Gupta, Abhishek and Hermans, Tucker and Narang, Yash and Fox, Dieter and Scaramuzza, Davide and Ramos, Fabio},
journal={arXiv preprint},
year={2025},
publisher={arXiv}
}